
浙江大学及其孵化的机器人团队4日发布四足机器人“绝影”的迭代版本。新一代“绝影”在原基础上进一步提升算法,已具备跑步及上下台阶的能力。
“绝影”由浙大控制学院、工程师学院教师朱秋国与浙大孵化企业云深处科技合作开发。在团队发布的视频中,记者看到“绝影”在塑胶跑道上富有节奏感地一路“小跑”,身体和四肢有细微的跃动姿态。
朱秋国告诉记者,在跑步时,“绝影”有近三分之一的时间是四足腾空的状态。 “比起行走时始终有足着地的状态,四足腾空意味着空中状态不受控,在着地时会受到更大的冲击力。在空中如何更好地保持平衡,在着地时更快地恢复动态稳定,这些细微之处体现了控制算法的最新进展。”朱秋国说。
此外,视频还展示了“绝影”在遇到堆放障碍物的台阶后,迅速调整步伐频率与高度,快速适应地形。在这一过程中虽然受到外力干扰、踩空打滑等影响,但“绝影”都迅速恢复了平衡。
据了解,“绝影”身长1米,四足站立时60厘米高,重70千克,载重可达到20公斤,跑步速度大于每小时6公里,续航时间2小时。
“绝影”四足机器人于今年2月首次发布,展现出反应快、姿态稳、定位准的性能,对复杂环境有很强的适应能力,引发高度关注。据介绍,“绝影”四足机器人可搭载多种设备,有望在安防巡检、物流运输、教育科研等方面进行实际应用。
-

浙江杭州夫妻醉酒老公床上酣睡妻子倒挂窗外 提醒:理性饮酒安全第一
头条 22-01-21
-

美国爸爸辅导孩子写汉字气到崩溃一行字写了3小时!网友:这跟国籍无关
头条 22-01-20
-

绝望! 女子隔离14天通过监控看狗子把家拆完 网友:感到“崩溃”
头条 22-01-20
-

辽宁沈阳男子冬天醉卧路边冻掉4根手指!网友:多亏被人发现
头条 22-01-18
-

重庆一孕妇剪毁婚庆店内32件婚纱礼服当事人发文
头条 22-01-17
-

中国空间站与国际空间站一张对比图火了 网友直呼:画面引起舒适
头条 22-01-13
-
辟谣!800多人被拉定边沙漠去隔离?西安网警:假的!
头条 22-01-11
-

生日蛋糕上插满课本男孩崩溃大哭 妈妈:想提醒他好好复习
头条 22-01-11
-

男子地铁摸女性屁股被扇3分钟耳光?警方通报
头条 22-01-06
-

天津高速现驼鸟奔跑 官方回应:系车主运输途中不慎掉落已被车主领回
头条 22-01-05
-

长得挺特别!菠萝味草莓一斤150元 网友:直接买个菠萝吃不好吗
头条 22-01-05
-

“秦始皇”做核酸珍贵画面流出?逗乐网友!调侃:“秦始皇也要核酸了!”
头条 21-12-31
-

985大学硕士妈妈吐槽儿子是学渣:他爸气得2次心梗!以后只希望孩子健康成长
头条 21-12-31
-

查干湖“头鱼”拍出299.9999万的天价!网友:怎么吃才体现它的身价
头条 21-12-29
-
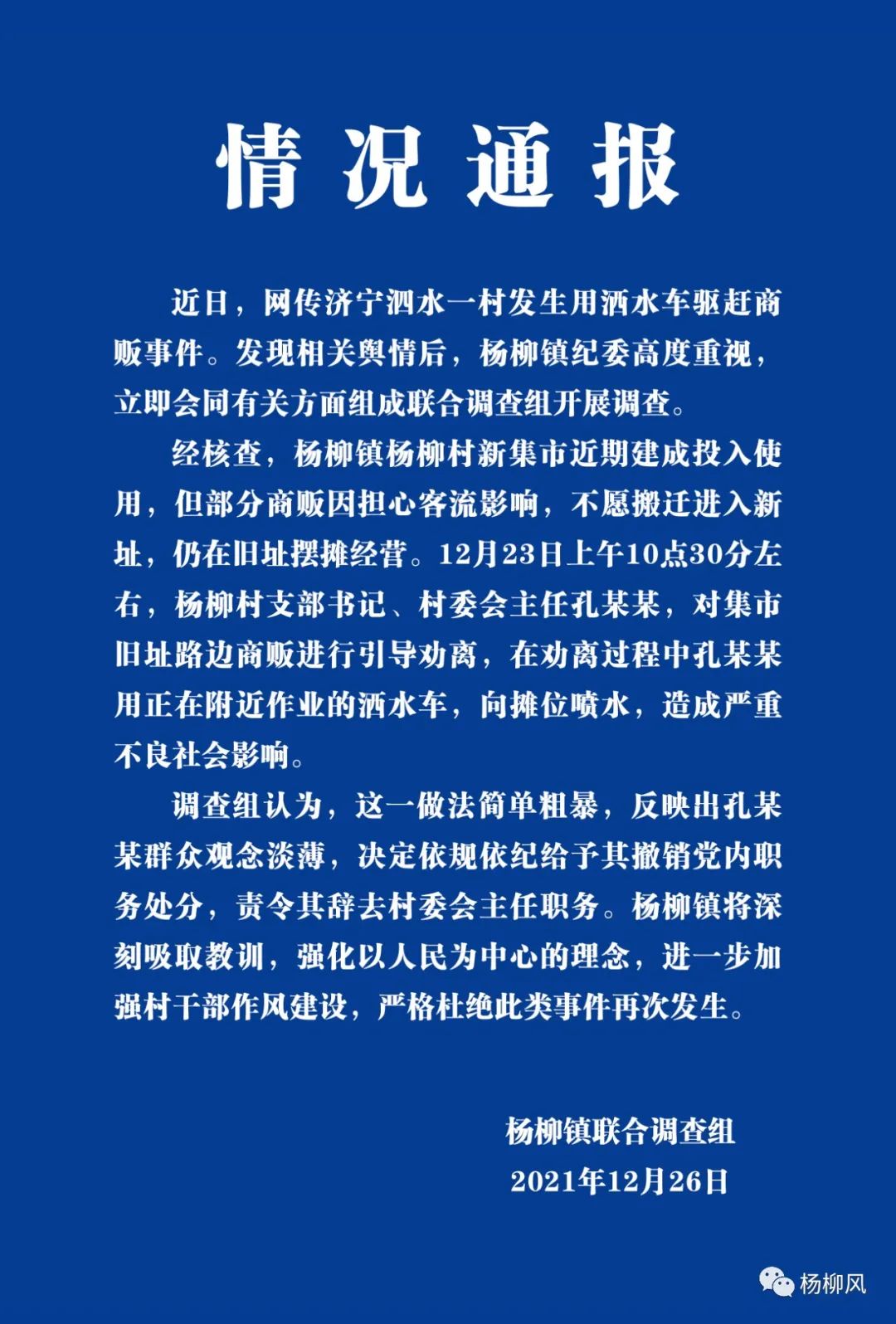
村主任用洒水车向摊位喷水?官方回应:责令其辞去村委会主任职务
头条 21-12-27
-
“外教辱骂防疫人员”,西安警方回应:已成立工作专班进行调查
头条 21-12-27
-

破防了!91岁奶奶和8岁猫咪的对话让人泪崩 网友:祝愿老人健康长寿
头条 21-12-23
-

5岁女童配合消防员教科书式自救 网友点赞:很勇敢!
头条 21-12-23
-
大爷被困电梯淡定唠嗑等救援 网友:为大爷的冷静沉着点赞!
头条 21-12-22
-
男子4万元存款18年后却被银行告知存款已被支取仅剩10块钱 法院:银行赔!
头条 21-12-20
-

深圳一男子加油站拔油枪点燃后逃跑 警方已介入调查纵火人员已锁定
头条 21-12-17
-

这位感动千万抖音网友的河南“留虾女孩” 入选央视年度短片《2021看见笑容》
头条 21-12-17
-

泪目!95岁妈妈病床前亲吻74岁生病的女儿 网友:孩子不管多大都是妈妈的宝贝
头条 21-12-15
-
川妹子抽中50颗榴莲直呼吃不完!网友:可以共享你的负担吗?
头条 21-12-15
-
河南省政府发布2022年元旦放假通知
头条 21-12-15
-
濮阳市聚碳新材料产业联盟成立
头条 21-12-15
-
周口机场预计什么时候建好?都有到哪些城市的航线?官方回复来了
头条 21-12-15
-
预计明年超50家企业回归,瑞银称中概股H股上市将继续升温
头条 21-12-15
-
新乡发现一境外输入奥密克戎病例密接者,活动轨迹公布
头条 21-12-15
-
河南:中药配方颗粒不得在医疗机构以外销售
头条 21-12-15
-
中原环保完成发行5亿元超短融,利率2.95%
头条 21-12-15
-
南阳市政府将与中车四方所在新能源装备等领域开展深入合作
头条 21-12-15
-
郑州出台新措施:公租房可“掌上”缴租秒办理
头条 21-12-15
-
国家统计局:11月社会消费品零售总额增长3.9%
头条 21-12-15
-
中国11月规上工业增加值同比增长3.8%
头条 21-12-15
-
1207万!全年就业超额完成预期目标
头条 21-12-15
-
河南凯旺科技公开发行2396万股新股,获6321.47倍申购
头条 21-12-15
-
事关货币政策、房地产、全面注册制,一行两会划定明年工作重点
头条 21-12-15
-
隔夜欧美·12月15日
头条 21-12-15
-
多部委密集部署明年工作!三大看点值得关注
头条 21-12-15
-
立方风控鸟·早报(12月15日)
头条 21-12-15
-
医药巨头今日登陆科创板!高瓴重仓"陪伴",引入"绿鞋"机制
头条 21-12-15
-
皮海洲:临门一脚踏刹车!龙竹科技终止转板说明了什么
头条 21-12-15
-
立方风控鸟·晚报(12月14日)
头条 21-12-14
-
成渝地区双城经济圈建设2022年拟推进160个重大项目,投资约2万亿元
头条 21-12-14
-
总投资额超百亿!中建七局接连中标两个EPC总承包项目
头条 21-12-14
-
2022年部分地方债提前下达,财政提前发力稳经济
头条 21-12-14
-
信阳华信投资集团10亿元中票完成发行,利率3.70%
头条 21-12-14
-
新强联拟择机出售所持明阳智能股票
头条 21-12-14
-
洛阳新强联拟亿元入股山东拟IPO公司,持股4.50%
头条 21-12-14
-
焦作在这场推介会上现场签约28个项目,总投资240亿元
头条 21-12-14
-
河南7种轻微交通违法可免罚
头条 21-12-14
-

广州高校发现古墓考古专业出动!网友:这不巧了嘛!毕业论文自己找来了
头条 21-12-14
-

浙江乐清民警自曝37岁未婚救下轻生女子 网友:一定要最爱自己
头条 21-12-14
-

画面感太强!主人出差猫咪打开水龙头把家淹了 网友:当然是原谅它
头条 21-12-09










































































- 加盟大平台,继往又开来!怡亚通全球招募合2022-01-25
- 伊利新春迷你剧《我耀我家》:关于春节和冬2022-01-25
- 360金融课堂学员:误入杀猪盘后的重生与成长2022-01-25
- 2021年全国海关查扣进出口侵权嫌疑货物7.92022-01-25
- 相约冰雪,一起来丨逐梦前行2022-01-25
- 国家卫健委:昨日新增确诊病例45例 其中本2022-01-25
- 相约冰雪,一起来|以中国速度完成冰雪运动2022-01-25
- 超全科普!一次看懂北京冬奥15个比赛项目2022-01-25
- 本次疫情郑州共开展了十轮全员核酸检测 共2022-01-25
- 噪声污染防治法将于2022年6月5日施行2022-01-25
- 扩散!疫情期间血透预约平台在郑好办App上2022-01-25
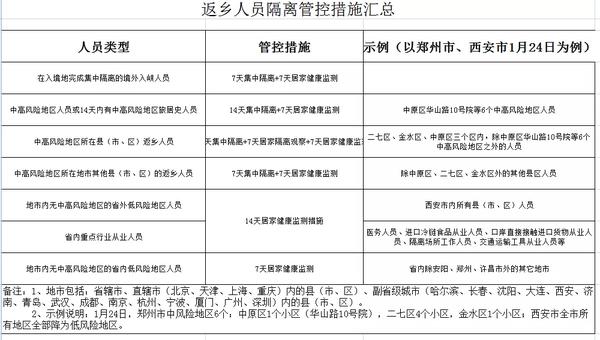
- 速看!三门峡:返乡人员隔离管控措施汇总2022-01-25
- 官方回应:关于禹州市一高一学生反映不能返2022-01-25
- 今年将建30家河南省科普基地 提升广大公众2022-01-25
- 春节前郑州有望全域“低风险” 1月25日起2022-01-25
- 周口郑州新生儿登记排全国前十 王李张等222022-01-25
- 洛阳全面深入推动县管校聘改革 800多所中2022-01-25
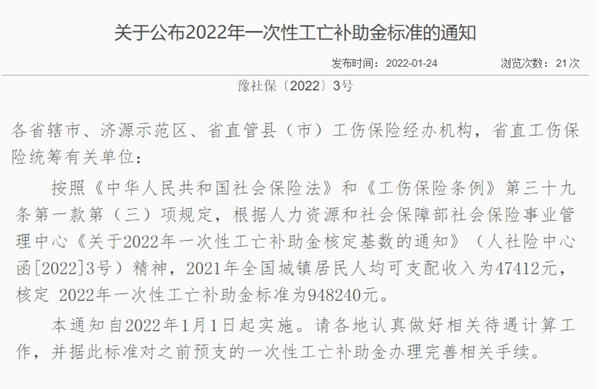
- 2022年度一次性工亡补助金标准确定 调整为2022-01-25
- 请乘坐合规车辆!这些网约车非法营运被查处2022-01-25
- 河南:26至28日多地仍有大到暴雪局部暴雪2022-01-25
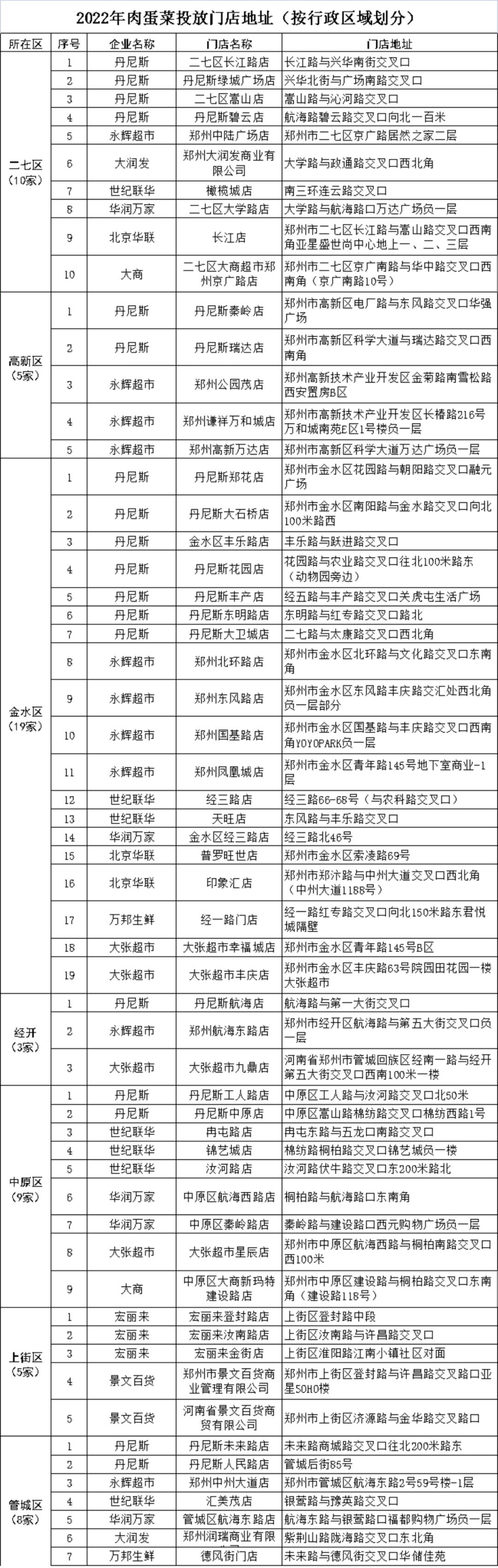
- 郑州市政府投放储备肉蛋菜 市民购买热情高2022-01-25
- 春节即将来临 郑州市全面禁售禁放烟花爆竹2022-01-25
- 郑州发布2022年32号通告:部分区域疫情风险2022-01-25
- 河南出台“十四五”期间系列养老服务体系“2022-01-25
- 春节前河南将出现一轮长时间大范围的中度至2022-01-25
- 郑州预计除夕前全域降为低风险 春运期间人2022-01-25
- 郑州行程卡何时摘星?调整风险等级及区域解2022-01-25
- 春运期间人员返郑离郑防控政策来了 返郑人2022-01-25
- 郑州发布31号通告:9个城区开展新冠病毒核2022-01-25
- 郑州已解除封控管控隔离群众 可根据病情需2022-01-25










