 (资料图)
(资料图)
该过程中最具挑战性的部分之一是创建能够发光的小型机器人。虽然这听起来并不困难,但你仍然要考虑到机器人萤火虫的重量和整体尺寸。因此,麻省理工学院的研究人员不得不将微小的电致发光粒子嵌入机器人所使用的人造肌肉中。
总的来说,这个过程给机器人增加了大约 2.5% 的重量。而另一个需要克服的困难是如何让其更平稳地飞行。与需要类似于螺旋桨的系统来移动的无人机不同,机器人闪电虫使用的是能够拍打内置翅膀的人工肌肉。这意味着麻省理工学院的机器人实际上是在拍打翅膀起飞,而不是像螺旋桨系统那样强迫空气在它下面移动。
为了使发光的品质发挥作用,研究人员必须创造一个不会阻挡光线的电极。为了做到这一点,他们使用了高度透明的碳纳米管。这些纳米管只有几纳米厚。因此,它们允许光线轻松而清晰地穿过它们。
由于这些机器人可以发光,研究人员可以在没有传感器的情况下追踪它们。相反,研究人员所需要的是一个能够捕捉到发射的光的摄像头。通常情况下,我们必须依靠笨重的红外摄像机。不过研究人员证明,他们可以使用标准的智能手机摄像头追踪机器萤火虫。
研究人员本月早些时候在《IEEE机器人和自动化通讯》上发表了这篇关于机器人萤火虫的论文。
-

世界热议:济源市审计局对8家国有投融资平台开展专项审计,重点关注有无国有资本流失等问题
头条 22-06-28
-

全球观察:华北水利水电、大连理工战略签约郑州昀家实业
头条 22-06-28
-
环球热推荐:隔夜欧美·6月28日
头条 22-06-28
-

当前快讯:立方风控鸟·早报(6月28日)
头条 22-06-28
-

热点聚焦:财政部下达超27亿元2022年地方电网光伏、风电等补贴
头条 22-06-28
-

全球观热点:未来哪些品类的流通主渠道会由线下迁移到线上?| 鲍跃忠专栏
头条 22-06-28
-

环球热文:宁德时代:拟使用不超230亿元募资进行现金管理
头条 22-06-28
-

全球微速讯:立方风控鸟·晚报(6月27日)
头条 22-06-28
-

最资讯丨@在郑人员,准备好!2000万元文旅消费券来了
头条 22-06-28
-

每日快播:@全国中小微企业,这些政策支持你→
头条 22-06-27
-

环球要闻:1~5月全国规上工业企业利润增长1.0%
头条 22-06-27
-

天天热推荐:平顶山市委书记张雷明带队赴北京开展招商考察活动
头条 22-06-27
-

今日看点:水利部研究推进陆地水资源卫星工程立项工作
头条 22-06-27
-

每日速讯:湖北省自然资源厅副厅长邹清平接受审查调查
头条 22-06-27
-

世界讯息:武汉:购买符合条件的新能源汽车 给予3000元购车大礼包
头条 22-06-27
-

全球动态:年内近三百家公司发布定增预案 募投方向聚焦新能源等
头条 22-06-27
-

全球速读:立方风控鸟·早报(6月27日)
头条 22-06-27
-

全球滚动:周口市关于推迟学生上学、人员上班的紧急通知
头条 22-06-27
-

【环球新视野】皮海洲:贵州茅台实施最豪分红方案 中小投资者能得到什么?
头条 22-06-27
-
焦点短讯!郑州市政府与哈工大联合筹建河南省实验室研讨会召开
头条 22-06-27
-

【全球独家】河南高温津贴上调 6月起连发4个月
头条 22-06-27
-
环球热讯:年抽采能力超20亿立方米!山西建成全国最大煤层气田
头条 22-06-27
-

【环球速看料】猛狮退、金刚退两只股票将于6月27日被摘牌
头条 22-06-27
-

简讯:央行公布最新一批牌照续展结果:52家支付机构完成续展
头条 22-06-27
-

环球观天下!上市20周年,铝基新材料巨头新目标锚定“低负债”“绿色低碳”
头条 22-06-27
-

要闻速递:金融助力三农!河南省线上常态化银企对接邀你明天见
头条 22-06-27
-
即时焦点:河南一清洁能源龙头企业完成股改,进入上市筹备阶段
头条 22-06-26
-

环球速递!预制菜渠道战一触即发,行业人士如何抉择向左还是向右?
头条 22-06-26
-
环球关注:预制菜爆款产品如何打造?这两家企业这样讲
头条 22-06-26
-

全球速讯:重磅!洛阳获世界客属第33届恳亲大会主办权
头条 22-06-26
-

当前资讯!安伟会见哈工大校长韩杰才一行 推动哈工大郑州研究院尽快做大做强
头条 22-06-26
-

今日最新!楼阳生召开河南省防汛视频调度会
头条 22-06-26
-
即时焦点:助力郑开同城化 郑州高新区与兰考县签订战略合作协议
头条 22-06-26
-

全球即时:总投资102.3亿元!河南6个内河航运项目集中开工 | 清单
头条 22-06-26
-

环球今头条!刚刚!河南启动防汛四级应急响应
头条 22-06-26
-

环球简讯:共话“豫”制菜新机遇,餐饮大咖如何抉择?
头条 22-06-26
-
环球百事通!国家卫健委:昨日新增本土确诊病例7例、本土无症状感染者15例
头条 22-06-25
-

每日焦点!经济日报:退市股再现“末日狂欢”?要不得!
头条 22-06-25
-

每日资讯:河南启动中原青年拔尖人才申报:计划遴选30名、每人资助50万
头条 22-06-25
-

消息!原阳县委书记刘兵:举全县之力跑赢预制菜新赛道
头条 22-06-25
-

全球速讯:隔夜欧美·6月25日
头条 22-06-25
-

焦点报道:立方风控鸟·早报(6月25日)
头条 22-06-25
-

世界今日讯!河南省耕地面积目前稳定在1.1亿亩以上,居全国第3位
头条 22-06-25
-

焦点!6月26日到27日,河南省将迎来一次暴雨天气
头条 22-06-25
-
全球新消息丨郑州航空港区管委会主任吴祖明带队赴京开展考察招商活动
头条 22-06-25
-

环球观天下!洛阳市市长徐衣显率队在广州考察企业并开展招商对接活动
头条 22-06-25
-
世界讯息:猛狮退:深交所维持对公司股票终止上市决定
头条 22-06-25
-

天天热头条丨漯河一医疗器械企业通过河南证监局辅导验收,拟冲刺北交所
头条 22-06-25
-
快讯:今晚的快乐是预制菜给的!原阳预制菜美食嘉年华开吃
头条 22-06-25
-

全球资讯:河南省农村重度残疾人照护和养老服务设施融合建设项目集中开工
头条 22-06-24
-

看热讯:河南平煤神马人力资源有限公司揭牌 将重点布局共享用工等16项业务
头条 22-06-24
-

世界新动态:郑州拟征收约380亩土地,用于轨道交通14号线、3号线项目建设
头条 22-06-24
-

全球微资讯!中牟1宗住宅地起始价成交,河南省豫农置业2.37亿元竞得
头条 22-06-24
-

全球今热点:郑州银行、中牟郑银村镇银行签约中牟县政府,拟3年提供不低于150亿元资金支持
头条 22-06-24
-
天天短讯!南阳将与燕园明德控股有限公司合作 共建职业技术大学等
头条 22-06-24








































































































- 今日热文:[视频]MIT研发机器萤火虫:能飞2022-06-28
- 天天资讯:6月27日河南无新增本土确诊病例2022-06-28
- 国家网信办发布《互联网用户账号信息管理规2022-06-28
- 本轮油价调价窗口6月28日24时 油价或将迎2022-06-28
- @青岛退役军人及优抚对象 优待证来了!即2022-06-28
- 注意防范!局部能见度小于100米!青岛市气2022-06-28
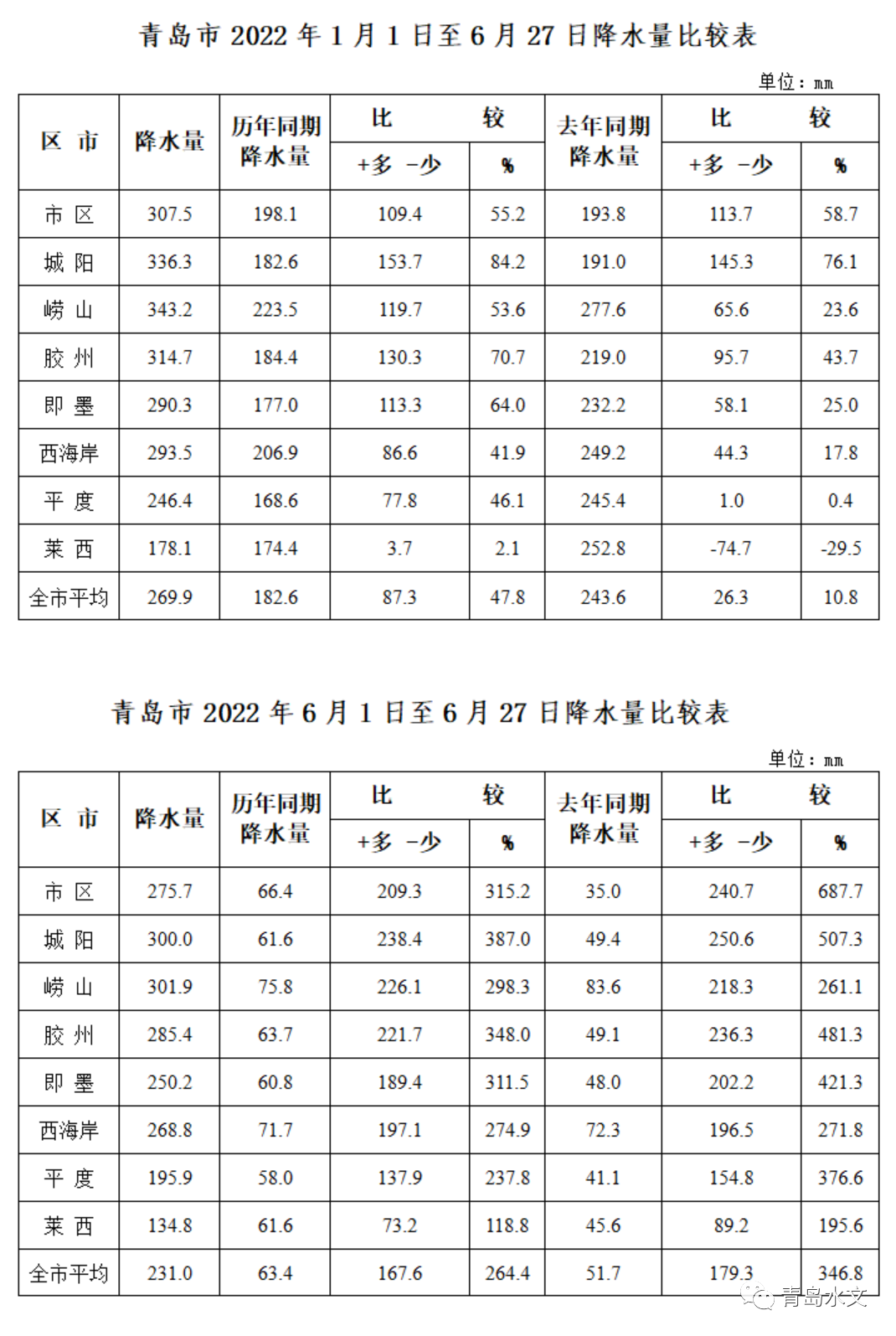
- 昨天青岛市平均降水量34.1毫米 目前23座大2022-06-28
- @青岛人 新建住宅房屋防水防渗漏工程保修2022-06-28
- 为什么要调整核酸检测政策?核酸检测“男女2022-06-28
- 速看!2022年厦门市开拓国内市场专项资金开2022-06-28
- 《厦门市实施退役军人教师培养计划工作方案2022-06-28
- 厦门:6月30日至7月4日 医保信息系统暂停2022-06-28
- 福建推出10条“福建非遗主题旅游”经典线路2022-06-28
- 福建推出10条“福建非遗主题旅游”经典线路2022-06-28
- 安徽7部门印发实施意见 外卖配送行为监管2022-06-28
- 安徽有序实行“撤桶并点” 推动开展定时定2022-06-28
- 池州市中考成绩预计7月上旬发布 查询渠道2022-06-28
- 池州市中考成绩预计7月上旬发布 查询渠道2022-06-28
- SHAREit实力出众,登陆全球 IAP 实力榜 Top72022-06-28
- 安徽全面落实工程款支付担保 未落实且责令2022-06-28
- 安徽“十四五”投资四千多亿 兴建52个高速2022-06-28
- 世界热议:济源市审计局对8家国有投融资平台2022-06-28
- 6亿元!安徽将给困难群众增发一次性补贴 72022-06-28
- 广东2022年普通高校招生志愿今起填报 分两2022-06-28
- 广东2022年普通高校招生志愿今起填报 分两2022-06-28
- 深圳:7月1日起不动产权登记终止收取5元印2022-06-28
- 注意绕行!宁波市发布一批交通管制公告 公2022-06-28
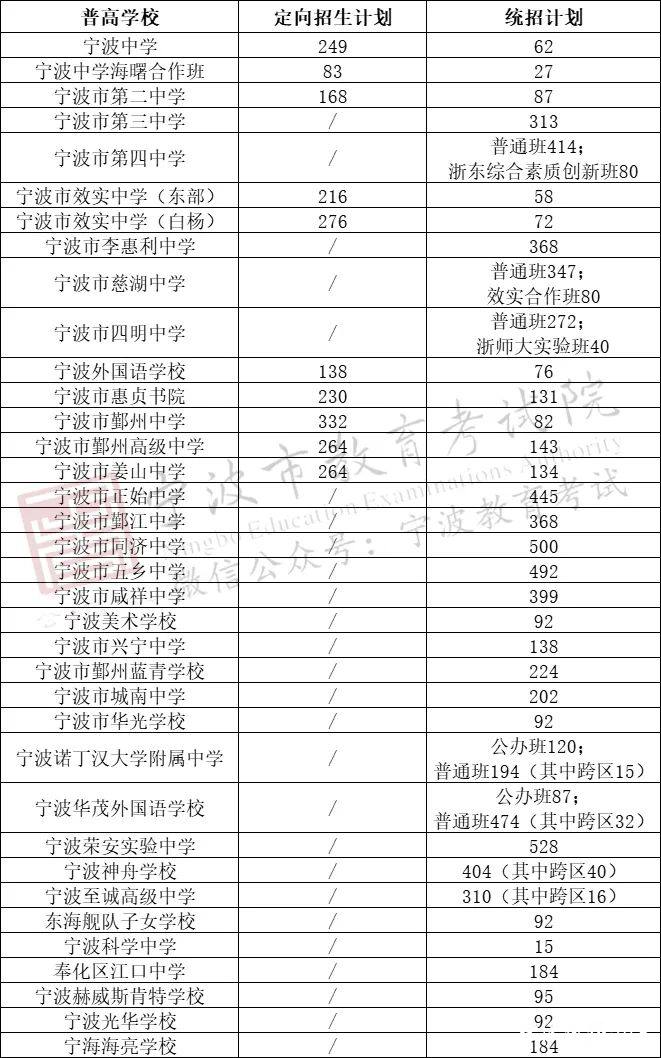
- 宁波中心城区普高剩余招生计划数公布 投档2022-06-28
- 宁波中心城区普高剩余招生计划数公布 投档2022-06-28
- 哪些情况可享受贷款新政?宁波公积金贷款新2022-06-28










