 【资料图】
【资料图】
据了解,SWIM系统由厘米级3D打印游泳微型机器人组成,长度约12厘米,配备MEMS传感器,由微型执行器驱动,并通过超声波进行无线控制。
携带SWIM机器人的着陆器降落在卫星冰壳上后,会释放一个穿冰机器人,利用其核电池的热量融化一条穿过冰层通往下方海洋的隧道。一旦到达那里,穿冰机器人将释放大约50个SWIM机器人,开始独立探索寒冷的水域。
每个SWIM机器人都有自己的推进系统、机载计算系统和超声波通信系统,还配有简单的温度、盐度、酸度和压力传感器。此外,它们还将携带监测生物标志物(生命迹象)的化学传感器。
SWIM能够对SESAME机器人无法触及的海水进行主动采样,以及对所需海洋特性、宜居性指标和潜在生物标志物的时间和空间分布测量。这些能力共同将使科学家能够更好地描述/了解外星海洋的组成和 NASA 首次海洋访问任务的可居住性。
NASA计划在2024年执行的“欧罗巴快艇”任务中部署这些游泳机器人。
-

【天天新视野】隔夜欧美·7月5日
头条 22-07-05
-

环球看点!茅台再招人:人均年薪13万,873个名额!上市酒企扩产潮不断,这些酒厂也在升级改造
头条 22-07-05
-

焦点信息:立方风控鸟·早报(7月5日)
头条 22-07-05
-

世界视点!安阳与中国人寿等银保机构签署战略合作协议
头条 22-07-05
-

全球观热点:郑州交警开展“一盔一带”查处专项行动,为期三个月
头条 22-07-05
-

每日关注!中诚信亚太授予中原资产国际信用评级“Ag-”,展望稳定
头条 22-07-05
-

世界信息:立方风控鸟·晚报(7月4日)
头条 22-07-05
-

全球热门:设研院二股东变更!河南规模5000亿国企无偿受让14.45%股份
头条 22-07-05
-

全球滚动:二手房成交参考价格已取消?西安住建局:可尊重卖方意愿
头条 22-07-05
-

焦点!生猪与饲料价格齐飞 全行业扭亏是大概率事件
头条 22-07-05
-

环球聚焦:院士领衔科技创新 南阳要打造全国饲料生产基地
头条 22-07-04
-

看点:前6个月南阳市完成省重点项目投资954.2亿
头条 22-07-04
-
世界热讯:江特电机回应赣锋锂业内幕交易:跟公司没有关系,公司并不知情
头条 22-07-04
-

信息:安阳今年已争取115.08亿元专项债 118个项目获支持
头条 22-07-04
-

当前信息:新乡慧联电子启动IPO辅导备案
头条 22-07-04
-
【天天快播报】河南首批5968.28万元稳岗返还资金已拨付到位
头条 22-07-04
-

环球速读:总投资5亿元!平顶山舞钢市与河钢集团签约建设废钢加工基地项目
头条 22-07-04
-

速讯:立方风控鸟·早报(7月4日)
头条 22-07-04
-

精彩看点:供应链金融专场再启!河南省线上常态化银企对接邀你周一见
头条 22-07-04
-

全球速读:期待!7月郑州将举办这些会展
头条 22-07-04
-

报道:赣锋锂业回应被立案:正配合证监会调查,对公司主营业务无影响
头条 22-07-04
-

天天观察:赣锋锂业董事长回应被证监会立案
头条 22-07-04
-

全球快报:海外最大中国股票基金减持宁德时代
头条 22-07-04
-

今亮点!国家卫健委:昨日新增75例本土确诊病例 新增310例本土无症状感染者
头条 22-07-03
-
天天快报!我国数字经济规模超45万亿元
头条 22-07-03
-
环球热推荐:何雄会见深圳和而泰智能控制有限公司董事长刘建伟一行
头条 22-07-03
-

【独家】携多个场景生态平台 兴业银行郑州分行亮相第二届数博会
头条 22-07-03
-
天天热资讯!总投资9.97亿元!河南能源30万吨MMA一期项目开工
头条 22-07-03
-

每日简讯:最高5万元!驻马店最新购房补贴申请流程公布
头条 22-07-03
-

焦点关注:农行河南省分行:特色普惠数字化小微信贷产品引青睐
头条 22-07-03
-

今日观点!邮储银行河南省分行荣获“数字普惠特别贡献奖”
头条 22-07-03
-
每日热门:河南老教授捐出8208万后,又捐300万!这才是该追的星!
头条 22-07-02
-

环球热资讯!隔夜欧美·7月2日
头条 22-07-02
-
当前资讯!安阳市委书记袁家健会见深圳丰网速运有限公司CEO周建一行
头条 22-07-02
-

【独家】立方风控鸟·早报(7月2日)
头条 22-07-02
-

快资讯:总价超2400亿!东航、南航、国航向空客购买292架飞机
头条 22-07-02
-

全球新动态:新乡财政拨款数千万元为群众投保,这些损失可赔付
头条 22-07-02
-

焦点讯息:一年出口超300亿元!香港人每天的餐桌上,都有来自河南的肉和菜
头条 22-07-02
-

天天热点评!立发风控鸟·晚报(7月1日)
头条 22-07-02
-

每日速读!全球500位超级富豪上半年财富总计缩水1.4万亿美元,创史上最大跌幅
头条 22-07-02
-

天天快资讯丨国家卫健委:昨日新增本土确诊病例12例、本土无症状感染者151例
头条 22-07-01
-
天天视讯!总投资110亿元,新乡第二批41个城建项目集中开工
头条 22-07-01
-

环球讯息:上海农投集团、上海康养集团正式揭牌成立
头条 22-07-01
-
天天时讯:总投资5.2亿元!郑大一附院将建设国家紧急医学救治基地
头条 22-07-01
-

环球关注:隔夜欧美·7月1日
头条 22-07-01
-

全球通讯!楼阳生到郑州航空港经济综合实验区调研
头条 22-07-01
-

【天天聚看点】立方风控鸟·晚报(6月30日)
头条 22-07-01
-

今日关注:KFM铜钴矿2023年上半年投产 洛阳钼业将成全球最大钴生产商
头条 22-07-01
-
微速讯:继东亚、北美物流专线升级后,郑州邮包直飞欧洲时效再缩短
头条 22-07-01
-

环球要闻:总投资1448亿元!南阳市157个合作项目签约
头条 22-07-01
-

天天微头条丨今天是最后一天!千万别忘做这件事!关乎你的钱袋子→
头条 22-06-30
-

【世界聚看点】骑仕精酿董事长刘元昌:让年轻人去研究“年轻人”
头条 22-06-30
-

世界观察:河南拟发行108. 06亿元地方债,含7. 36亿元新增一般债
头条 22-06-30
-

【世界报资讯】开封市一项目获2350万元中央预算内资金支持
头条 22-06-30
-
当前速读:总金额1120.23亿!武汉签约56个汽车产业链招商项目
头条 22-06-30




















































































































- 【天天新视野】NASA将开发微型游泳机器人:2022-07-05
- 每日简讯:郑州10所市属高中今秋建成,来看2022-07-05
- 环球短讯!“人类摇篮”中的南方古猿化石或2022-07-05
- 【世界聚看点】【“三个一批” 一年间】项2022-07-05
- 环球热点评!NASA“露西号”航天器太阳能阵2022-07-05
- 今热点:7月4日河南无新增本土确诊病例2022-07-05
- 播报:比你想象的更聪明:科学家发现狗对熟2022-07-05
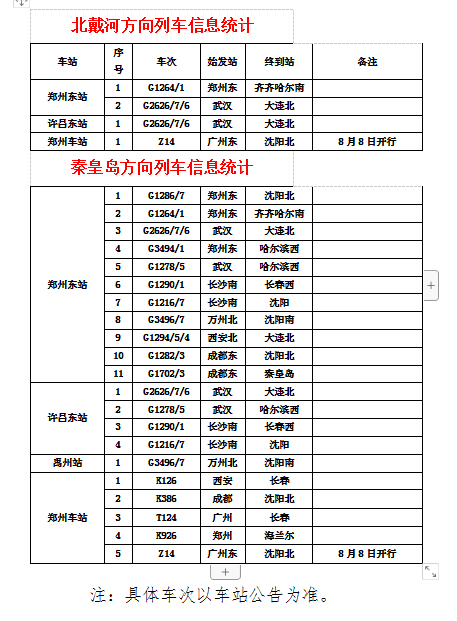
- 提醒!这些方向列车需要二次安检 请务必提2022-07-05
- 河南启动突出交通违法行为专项整治百日行动2022-07-05
- 河南省首批稳岗返还资金5968.28万到位 惠2022-07-05
- 速看!河南省防汛抗旱指挥部启动防汛四级应2022-07-05
- 河南省社会责任企业名单出炉 多个集团入选2022-07-05
- 2021年度河南省老龄工作和老龄健康工作先进2022-07-05
- 信阳市“房票”政策实施仨月成效如何?探索2022-07-05
- 郑州交警开展为期3个月的“一盔一带”查处2022-07-05
- 郑州10所市属高中今秋建成 让更多省会学子2022-07-05
- 郑州高新区关于“高新区教师招聘考试”有关2022-07-05
- @河南2022年困难毕业生 符合条件可申请2002022-07-05
- 焦点快报!泌阳县气象局发布暴雨蓝色预警「I2022-07-05
- 【新要闻】桐柏县气象台发布暴雨橙色预警「2022-07-05
- 今日视点:IV级应急响应启动!周口今晚大雨2022-07-05
- 【天天新视野】隔夜欧美·7月5日2022-07-05
- 全球快播:漯河交警化身“奶爸”,考场外帮2022-07-05
- 环球看点!茅台再招人:人均年薪13万,8732022-07-05
- 焦点信息:立方风控鸟·早报(7月5日)2022-07-05
- 环球微头条丨平顶山市气象局启动防汛Ⅳ级应2022-07-05
- 环球时讯:胰岛素集采在31省全面落地2022-07-05
- 环球要闻:王亚平人民日报撰文讲述出舱:“2022-07-05
- 今日热搜:黑龙江伊春伊美区通报桃源小区22022-07-05
- 全球焦点!国家发改委回应猪价过快上涨2022-07-05
精彩推荐


阅读排行
- 每日简讯:郑州10所市属高中今秋建成,来看都有哪些→
- 【世界聚看点】【“三个一批” 一年间】项目建设为何站C位?
- 今热点:7月4日河南无新增本土确诊病例
- 河南启动突出交通违法行为专项整治百日行动 严查肇事和酒驾
- 河南省首批稳岗返还资金5968.28万到位 惠及484家企业12.1万名职工
- 速看!河南省防汛抗旱指挥部启动防汛四级应急响应
- 2021年度河南省老龄工作和老龄健康工作先进单位和先进个人名单公布
- @河南2022年困难毕业生 符合条件可申请2000元求职创业补贴
- 热讯:严查肇事和酒驾!河南启动突出交通违法行为专项整治百日行动
- 天天通讯!郑州:骑车不戴头盔要打“小黄旗”执勤 坐机动车后排不系安全带会受罚









