(相关资料图)
(相关资料图)
(图自:Chalmers University of Technology)
按照计划,这艘母舰会投放到海上预定的搜救区域。除了负责打通本地通信和互联网上行链路,它还舰载了计算单元、GNSS 定位导航、以及 IMU 系统。
在从甲板上推出固定翼无人机后,机载的 RGB 与红外摄像头能够用于搜寻掉落于水中的目标,且空中侦查无人机能够在智能网格算法下高效运作。
若空中无人机检测到了水中目标,便可将坐标和视频片段发回 Seacat 中枢,并等待地方当局正式派出救援力量。
确定目标对象是需要救助的人员后,还可排除四轴无人机来实时传输视频,以及投递救生圈或其它补给品。
等到电量即将耗尽的时候,无人机会自行返航并降落于附近水域、发出广播信号并等待被取回充电,以便后续重新加入搜救工作。
来自该校查莫斯流体力学系的 Xin Zhao 表示:“得益于不同无人机的优势,该项目能够开展多种不同类型的协同工作,以显著提升搜救效率和救援响应速度、进而挽救更多生命”。
目前 Seacat 已在水上证明了自己的能力,不过项目负责人 Ola Benderius 指出,想要将三无人机概念正式投入运营,可能还需要配备一个速度稍快的海上平台。
此外一架空中无人机原型已开始从头打造,且研究人员已测试其四轴飞行器。
该校车辆工程和自主系统系副教授 Benderius 表示:作为扩展项目的一部分,后续他们将把所有系统组合到一起,并于海上对其展开全面的测试。
-

天天亮点!河南昨日新增本土确诊病例9例,新增本土无症状感染者64例
头条 22-07-12
-

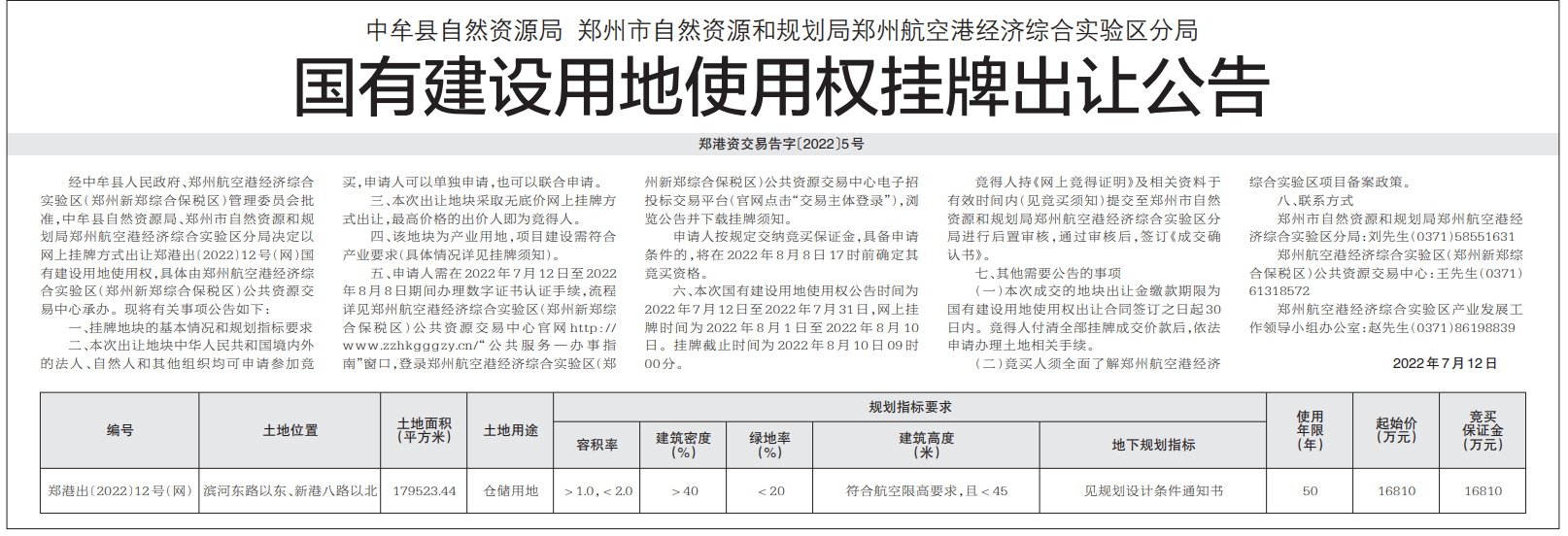
热讯:起始价1.68亿元,郑州269亩仓储用地挂牌出让
头条 22-07-12
-

每日热文:河南出台新政:将动态调整医疗服务价格,医疗机构不得变相提高收费
头条 22-07-12
-

环球最资讯丨隔夜欧美·7月12日
头条 22-07-12
-

焦点短讯!多地提高医保最低缴费年限,男30年女25年,啥信号?
头条 22-07-12
-

当前资讯!立方风控鸟·早报(7月12日)
头条 22-07-12
-

全球新动态:开封上半年科技支出7.9亿元 设立2000万元“汴科贷”准备金池
头条 22-07-12
-

全球报道:河南濮阳国家粮食储备库有限公司法人代表常爱国接受监察调查
头条 22-07-12
-
焦点关注:立方风控鸟·晚报(7月11日)
头条 22-07-12
-

观点:中原科技担保在保余额突破30亿元
头条 22-07-12
-

全球今热点:鹤壁牵手中国农大 签约国家玉米改良中心鹤壁研究院
头条 22-07-12
-

天天热消息:南阳将与京东合作建设数字经济产业园、跨境电商综合试验区等
头条 22-07-11
-

热议:第二个国家植物园来了!华南国家植物园今天揭牌成立
头条 22-07-11
-

世界讯息:南阳将建智慧冷链物流产业园 打造中国冷链物流之都
头条 22-07-11
-

世界快资讯丨南阳市委书记朱是西率团考察现代汽车集团(中国) 推动项目落地
头条 22-07-11
-

焦点短讯!傅政华被提起公诉
头条 22-07-11
-

当前热文:登封市3宗零售商业用地7024万元出让,由这家公司竞得
头条 22-07-11
-

当前通讯!河南省昨日新增本土无症状感染者12例
头条 22-07-11
-
前沿资讯!国家卫健委:昨日新增本土确诊46例 新增本土无症状感染者306例
头条 22-07-11
-
每日热议!何雄会见北京云迹科技股份有限公司客人
头条 22-07-11
-

全球焦点!立方风控鸟·早报(7月11日)
头条 22-07-11
-
焦点观察:安伟会见360集团董事长周鸿祎一行
头条 22-07-11
-

天天快看:到2025年,河南省超90%县域医疗中心达到三级医院医疗服务能力水平
头条 22-07-11
-

每日聚焦:黄河防总、黄委分别启动黄河防汛四级应急响应和水旱灾害防御Ⅳ级应急响应
头条 22-07-11
-

环球今亮点!融信中国两笔美元债利息到期未付,合计2786.55万美元
头条 22-07-11
-

焦点热议:河南省线上常态化银企对接周一见!十余家银行将围绕绿色金融产品开讲
头条 22-07-11
-

世界聚焦:政校企一体、产学研联动,洛阳市将打造产教融合高技能创新公共实训基地
头条 22-07-11
-

每日速递:河南银保监局 河南省地方金融监管局 表示禹州新民生等村镇银行风险处置方案即将公布
头条 22-07-11
-

环球新资讯:山西省公布900家专精特新、小巨人企业 | 名单
头条 22-07-10
-

当前动态:焦作召开专题会议:研究呼南高铁豫西通道焦作段建设情况
头条 22-07-10
-

每日热讯!刘代军任郑州航空工业管理学院院长
头条 22-07-10
-

当前滚动:河南省昨日新增本土无症状感染者4例
头条 22-07-10
-

世界快资讯:河南省地方金融监管局组织召开金融运行分析座谈会
头条 22-07-10
-
世界滚动:何雄会见三一集团客人
头条 22-07-10
-
今热点:郑州全面推行企业首席质量官制度,力争2025年重点行业中小微企业聘任率超八成
头条 22-07-10
-

环球播报:洛阳市委书记江凌与格力电器董事长董明珠一同察看格力在洛产业项目
头条 22-07-10
-

每日速讯:小米捐赠5亿元成立北京市自然科学基金-小米创新联合基金
头条 22-07-10
-

天天观焦点:标品信托业务大增!6月集合信托发行、成立双双反弹
头条 22-07-10
-

快看点丨涉多个管理岗!河南AA+市属国企拟招10人
头条 22-07-10
-

全球速讯:正在编制,商丘将新建多条铁路,形成“米”字型
头条 22-07-10
-

全球速讯:河南省首个基因检测试剂盒GMP研发生产基地建成投产
头条 22-07-10
-

即时看!国家卫健委:昨日新增本土确诊病例67例,新增本土无症状感染者304例
头条 22-07-09
-

世界今亮点!6月份居民消费价格同比上涨2.5%,环比持平
头条 22-07-09
-

世界讯息:今年前5个月河南外资项目数量同比增长21.8%
头条 22-07-09
-
全球新消息丨隔夜欧美·7月9日
头条 22-07-09
-
环球通讯!立方风控鸟·早报(7月9日)
头条 22-07-09
-

全球热点评!一上市公司拟以污水处理厂作为入池资产申报基础设施公募REITs
头条 22-07-09
-

每日快播:河南瑞瀛京宛创业投资基金落地南阳 规模5亿元
头条 22-07-09
-

环球快资讯丨郑州银行战略签约平顶山市政府 将提供不低于300亿元支持
头条 22-07-09
-
天天观热点:深交所发布上市公司信披考核成绩单,这家豫股连续八年获“A”评级
头条 22-07-09
-

-

【全球新视野】最新!南阳规划建设临港产业园
头条 22-07-08
-
当前消息!1月~6月,许昌保税物流中心实现进出口总值63774万元
头条 22-07-08
-
【世界独家】总投资近50亿元,南阳内乡县新签约7个项目
头条 22-07-08
-

【天天新视野】百万千瓦级!全球最大水光互补电站开工建设
头条 22-07-08













































































































- 天天快看点丨Chalmers研究团队展示基于舰载2022-07-12
- 环球快讯:如何观看正飞向地球的巨大彗星C/22022-07-12
- 天天信息:日本正在研究用于月球和火星的人2022-07-12
- 环球今头条!NASA EZIE任务迎来关键里程碑2022-07-12
- 浙江公布2022年退休人员基本养老金调整方案2022-07-12
- 《佛山市城市轨道交通乘客守则》印发 将于2022-07-12
- 广州地铁站命名拟加重历史文化保护分量 “2022-07-12
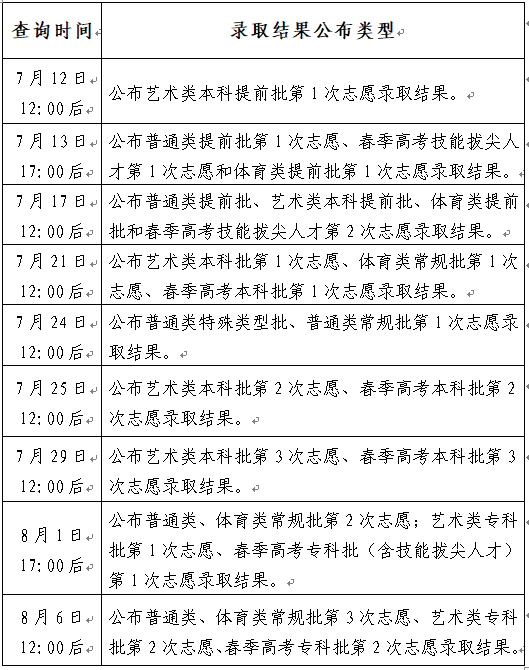
- 山东省教育招生考试院:高考录取结果今天能2022-07-12
- 山东省教育招生考试院:高考录取结果今天能2022-07-12
- 厦门市中考成绩有望今晚公布 三种途径可查2022-07-12
- 厦门市中考成绩有望今晚公布 三种途径可查2022-07-12
- 厦门市今年第1号总河长令签发 巩固提升河2022-07-12
- 厦门今年上半年各部门和单位省市重点项目推2022-07-12
- 福建省财政加大奖补力度 鼓励发展地方优势2022-07-12
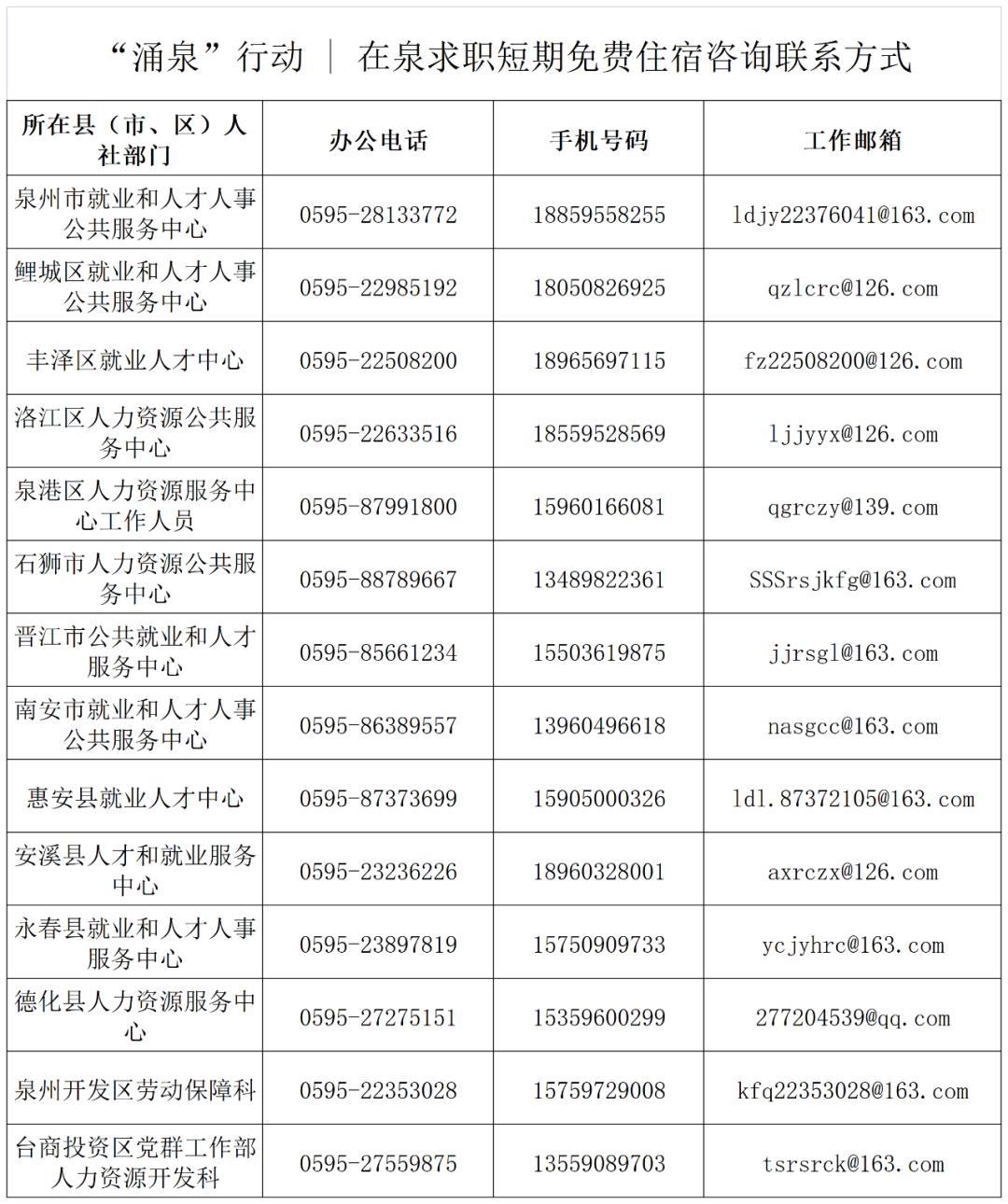
- 泉州人才求职短期免费住宿酒店公寓 申请材2022-07-12
- 福建省消委会提醒消费者:警惕网红景点“照2022-07-12
- 福建省消委会提醒消费者:警惕网红景点“照2022-07-12
- 安徽省考试院高招录取期间开通夜间值班电话2022-07-12
- 安徽省考试院高招录取期间开通夜间值班电话2022-07-12
- 安徽公布青年创业园扶持政策 最高补助7002022-07-12
- 安徽省2022年普通高校招生提前批次本科院校2022-07-12
- 安徽省2022年普通高校招生提前批次本科院校2022-07-12
- 到2025年芜湖市新建口袋体育公园不少于72个2022-07-12
- 安徽加快科技成果产业化应用体系建设 到202022-07-12
- 车购税减半征收政策实施“满月” 安徽省共2022-07-12
- 前6个月合肥公共资源交易成交额2170.43亿元2022-07-12
- 《郑州市“十四五”现代服务业发展规划》印2022-07-12
- @郑州市民 郑州核酸筛查政策六问六答来了!2022-07-12
- 环球视讯!「今日天气预报」南阳2022年07月2022-07-12
- 全球看热讯:「今日天气预报」商丘2022年072022-07-12
精彩推荐


阅读排行
- 最新!河南:对4家村镇银行账外业务客户本金分类分批开展先行垫付工作
- 山东向河南兑现生态补偿资金1.26亿元 生态“对赌” 没有输家
- 河南省普通高中计划招生906342人 适度扩大中等职业学校招生规模
- 全球快资讯丨7月11日河南新增本土确诊病例9例 本土无症状感染者64例
- 全球速递!河南气象:今日我省淮河以北多地仍有中雨到暴雨
- 河南已有3地报告阳性病例!多地开展核酸检测加强疫情防控工作
- 本周河南省大部分地区多分散性阵雨 各地须加强防汛备汛
- 你的录取通知书在路上!河南高考录取通知书寄递工作已启动
- 速看!河南省2022年艺术类本科提前批部分院校征集志愿的通知
- 每日热文:河南一外卖小哥送餐路上收到研究生录取通知书