 (资料图片)
(资料图片)
工程师们在位于克利夫兰的美国宇航局格伦研究中心的模拟月球操作(SLOPE)实验室中对最新的VIPER移动性工程测试单元,即月球引力代表单元3(MGRU3),进行了测试。MGRU3具有专门为月球车设计的电机控制器。它是月球车移动系统中的一个关键硬件,控制向月球车四个轮子输送动力的电机。
“与大多数使用油门和制动器来加速和减速所有四个车轮的汽车发动机不同,VIPER的电机控制器使漫游者车轮以驾驶员想要的力量和速度转动,具有极高的精度,可以实现更好的性能,”位于加州硅谷的NASA艾姆斯研究中心的测试主管和漫游者系统工程师Arno Rogg说。“这些测试使我们能够验证漫游车移动系统的性能,并知道它将在月球上运行良好。”
工程师们还利用这些测试来帮助确定漫游车将如何处理月球表面的困难地形条件。
“我们想看看漫游车是否能够在极端的下沉环境中前进,以及VIPER可能会开得慢多少,或者漫游车会因为棘手的土壤条件而使用多少额外的动力,”艾姆斯研究中心的VIPER风险经理和任务系统工程技术互换负责人Mercedes Herreras-Martinez说。
使用最新的漫游车软件,工程师们还测试了原型车的“inch-worm”能力。这种特殊的技术是通过以一种特殊的、类似于毛毛虫的协调方式移动其车轮来帮助漫游车解困。漫游车原型还证明,如果它接近一个对它来说太过陡峭的斜坡,或者如果它曾经失去了对其在月球上的位置的追踪,它将自主地停止移动。
Rogg说:“我们通过这些测试捕获了大量的数据,了解当漫游车车轮碾过岩石或在松散的地形上打滑时会发生什么,以及任何传感器的漂移--当漫游车稍微偏离方向时。”
根据VIPER科学团队的建议,漫游车原型遇到的所有类似月球的地形和其他危险都被有条不紊地故意放在SLOPE实验室中。然后,工程测试团队精心挑选了土壤模拟物,手工挑选了岩石,甚至精心设计了陨石坑的形状和大小,以逼真地模仿月球南极表面的实际特征。
除了测试漫游车在困难的地形特征上行驶的能力外,另一个目标是测试漫游车在月球地形上的表现,团队预计漫游车在大多数时候会遇到。
“利用以前月球任务的数据和图像,我们创建了各种随机场景来模仿月球表面的地形,在SLOPE倾斜床上散布着不同大小和形状的陨石坑和岩石,”艾姆斯研究中心的漫游车和任务系统工程实习生 Kevin May说,他领导了这次测试的地形准备。“在VIPER科学团队的帮助下,他们生成了陨石坑轮廓的切割模板,我们能够从地形中形成特征,并塑造出比以往更精确的陨石坑。通过再现真实的月球环境,我们可以更好地了解VIPER在月球表面的表现。”
-

当前滚动:隔夜欧美·8月3日
头条 22-08-03
-

焦点速读:郑州高新技术企业后备库扩容至4500家
头条 22-08-03
-

前沿资讯!立方风控鸟·早报(8月3日)
头条 22-08-03
-

今日视点:外交部召见美国驻华大使:中方坚决反对、强烈谴责佩洛西窜访台湾
头条 22-08-03
-

世界动态:台媒:佩洛西专机降落台北松山机场,吴钊燮接机
头条 22-08-03
-

环球通讯!国防部新闻发言人吴谦就佩洛西窜访台湾发表谈话
头条 22-08-03
-

环球资讯:东部战区将在台岛周边开展一系列联合军事行动
头条 22-08-03
-

热议:山东莱州紧急通知:陆军炮兵旅将进行海上军事训练,严禁进入落弹区域
头条 22-08-03
-

全球微头条丨“佩洛西专机”从3.5万英尺的巡航高度下降
头条 22-08-02
-

今日聚焦!台媒称解放军歼-16战机现身巴士海峡,台军IDF、“幻影”各4架次升空
头条 22-08-02
-

焦点!台媒:佩洛西专机降落台北松山机场
头条 22-08-02
-

【世界报资讯】中共中央台湾工作办公室就佩洛西窜台发表声明
头条 22-08-02
-

焦点!公告:解放军4日至7日进行重要军事演训行动
头条 22-08-02
-

-

环球短讯!外国飞行航班信息平台:“佩洛西专机”信息显示目的地——台北
头条 22-08-02
-

环球今头条!贵州茅台:上半年净利润297.93亿元,同比增长20.85%
头条 22-08-02
-

-

环球今亮点!台媒:台北市警方证实,佩洛西班机今晚10时降落松山机场
头条 22-08-02
-
今日快讯:立方风控鸟·晚报(8月2日)
头条 22-08-02
-

全球视讯!央行公布支付体系运行情况:截至一季度末,全国共开立银行卡93.19亿张
头条 22-08-02
-

当前快播:河南四部门将确定中小微企业名单,自8月起享受职工医保缓缴政策
头条 22-08-02
-

天天新消息丨最高可贷80万、可选组合贷!郑开住房公积金同城化业务指南公布
头条 22-08-02
-

热资讯!北交所金刚石微粉第一股惠丰钻石:成功研发出培育钻石产品
头条 22-08-02
-

播报:洛阳计划筹建5万套保障性租赁住房,将优先供应来洛大学生
头条 22-08-02
-

每日精选:王毅:美方在台湾问题上背信弃义,只能使其国家信誉进一步破产
头条 22-08-02
-

全球微资讯!硅烷科技下调A股IPO发行价至4.7元/股,此前上会被暂缓审议
头条 22-08-02
-
全球关注:财政部修订高校财务制度,严禁新增地方隐性债务
头条 22-08-02
-

快资讯丨华夏幸福首单产业新城轻资产业务落地,已与平顶山高新区签署协议
头条 22-08-02
-

全球热讯:恒星科技:拟以不动产进行抵押担保,融资1.5亿元
头条 22-08-02
-

全球信息:嘉兴楼市新政:二孩、三孩家庭买新房最高补贴10万元
头条 22-08-02
-

全球资讯:中原证券拟发行40亿元次级债券,已获上交所受理
头条 22-08-02
-

世界播报:"千亿房企"数量腰斩!前7月房企拿地规模下降55.6%
头条 22-08-02
-

微速讯:银保监会就人身保险产品信息披露管理办法征求意见
头条 22-08-02
-
【世界独家】河南一AAA级平台公司拟发行50亿元小公募,已获上交所受理
头条 22-08-02
-

当前热文:佩洛西此前所乘专机已起飞,目的地未知
头条 22-08-02
-

全球观天下!华春莹:美国挑衅导致台海局势升级,美方须负全责
头条 22-08-02
-
全球新动态:濮阳:市辖各农商银行分别单列3亿元“人才贷”信贷投放计划
头条 22-08-02
-

环球消息!信阳市与中南林科大举行工作交流座谈会 推动万华生态等企业落户
头条 22-08-02
-

天天视讯!焦作9个开发区签约23名英才
头条 22-08-02
-

观焦点:投资1.2亿!温氏又一育种场项目签约
头条 22-08-02
-

天天日报丨4家央企领导人员及1名央企专职外部董事职务任免
头条 22-08-02
-

最新资讯:河南省昨日新增本土确诊病例2例,新增本土无症状感染者67例
头条 22-08-02
-

全球速读:起始价5647万元,郑州约5.27亩零售商业用地挂牌出让
头条 22-08-02
-

每日消息!隔夜欧美·8月2日
头条 22-08-02
-

讯息:防止挪用,这个城市放大招!公示85个在售楼盘资金监管账户
头条 22-08-02
-
当前快看:建业地产委任邓高强、及时松为非执行董事
头条 22-08-02
-
天天快报!立方风控鸟·早报(8月2日)
头条 22-08-02
-

动态:刚刚公布!河南70地上榜,有你老家吗?
头条 22-08-02
-
【天天时快讯】郑州市金水区上半年经济总量达千亿元
头条 22-08-02
-

环球微速讯:总投资6290亿元!川渝住建领域机会清单发布 | 附523个项目详情
头条 22-08-02
-
环球热议:8月中旬投入运营!郑州再添一级大型农产品交易市场
头条 22-08-01
-
世界微资讯!宁德时代副董事长黄世霖辞职,曾毓群兼任总经理
头条 22-08-01
-
焦点速讯:牵手宁波大学,新乡延津县致力打造“中国内陆青蟹之乡”
头条 22-08-01
-

百事通!世茂股份:将为子公司3亿元借款展期提供担保
头条 22-08-01
-
全球简讯:上海长耘将受让三晖电气10.72%股份,仍为其控股股东
头条 22-08-01































































































































- 天天观察:NASA的VIPER原型车在测试中通过2022-08-03
- 热资讯!欧空局EnVision任务计划让航天器在2022-08-03
- 环球热门:俄航天局澄清:并不是“2024年就2022-08-03
- 天天报道:科学家解释在海底发现的“神秘团2022-08-03
- 当前关注:8月2日河南新增本土无症状感染者2022-08-03
- 兰考发布最新通告:8月3日0时起调整疫情风2022-08-03
- 大河村仰韶文化博物馆进入精装修阶段 采用2022-08-03
- 河南省2022年普通高招专科提前批体育专科艺2022-08-03
- 河南省2022年普通高招专科提前批体育专科艺2022-08-03
- 1000千伏南阳—荆门—长沙特高压线路工程河2022-08-03
- 河南省安全生产委员会发布通知:切实做好高2022-08-03
- 河南省体育局发出文明健身倡议书 广场舞健2022-08-03
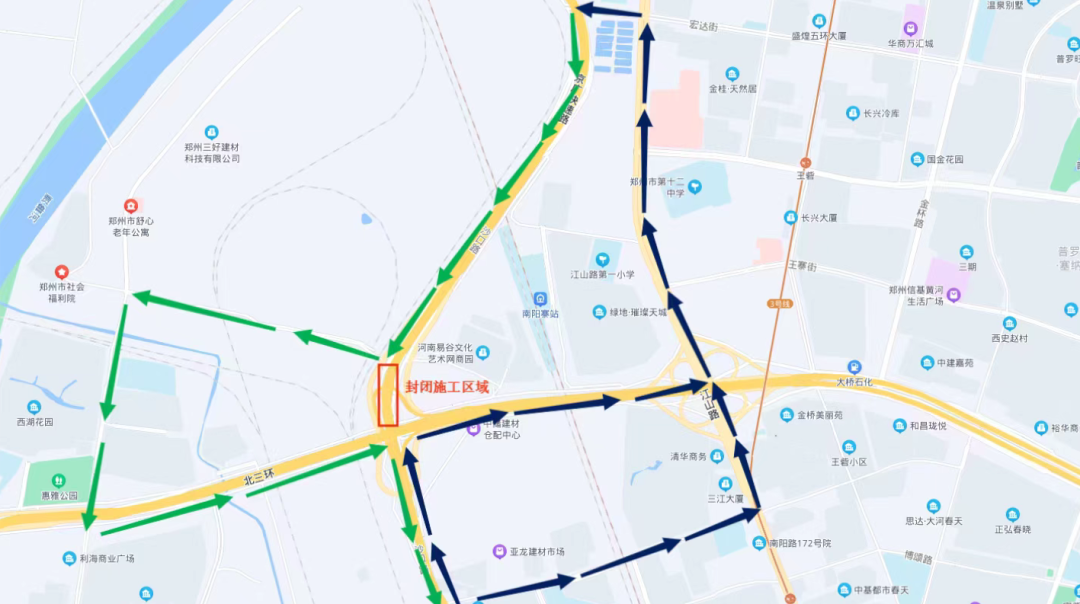
- @郑州车主 这里即将夜间封闭施工 出行请2022-08-03
- 信阳市加力推进“人人持证技能河南”建设 2022-08-03
- 郑州市最新出行政策汇总 (8月2日更新)2022-08-03
- 郑州二七区发布通告:8月3日开展新一轮新冠2022-08-03
- 大货车请绕行!省道328南召(小张沟至五朵2022-08-03
- 河南省应往届毕业生青年人才专场招聘会在郑2022-08-03
- 8月起郑州市区共享单车违停5次以上将被限制2022-08-03
- 全球通讯!火中取栗者必将玩火自焚2022-08-03
- 天天热讯:青年执行法官赵鑫:以法为剑 守2022-08-03
- 世界微动态丨当身边的同龄人开始恐婚2022-08-03
- 当前滚动:隔夜欧美·8月3日2022-08-03
- 焦点速读:郑州高新技术企业后备库扩容至452022-08-03
- 前沿资讯!立方风控鸟·早报(8月3日)2022-08-03
- 今日播报!辉县市气象局发布雷暴大风黄色预2022-08-03
- 观天下!「夏季整治百日行动」漯河交警:持2022-08-03
- 环球微速讯:高温天气下 这群人保质保量完2022-08-03
- 【当前独家】8月2日新疆生产建设兵团第四师2022-08-03
- 全球视点!河南高温来袭 注意防范2022-08-03
精彩推荐

阅读排行
- 当前关注:8月2日河南新增本土无症状感染者56例
- 大河村仰韶文化博物馆进入精装修阶段 采用下沉式的建筑设计屋顶与地面齐平
- 河南省2022年普通高招专科提前批体育专科艺术类专科对口专科8月3日开始投档
- 河南省安全生产委员会发布通知:切实做好高温雨季安全防范 保障人民群众生命财产安全
- 河南省体育局发出文明健身倡议书 广场舞健步走夏季在21:00前结束
- 河南省应往届毕业生青年人才专场招聘会在郑州举办 提供岗位7900余个
- 环球微速讯:高温天气下 这群人保质保量完成400批次计量监督专项抽查
- 全球视点!河南高温来袭 注意防范
- 天天热推荐:大象专访|恶意剪辑?失了精髓?“花少”总导演回应:我们只是真实记录和呈现
- 全球今亮点!出门就进“桑拿房”!未来一周河南将迎高温天气,体感温度或超50℃









