
(相关资料图)
央视网消息:据中国载人航天工程办公室消息,神舟十四号乘组今天(11月17日)进行第三次出舱活动,截至北京时间11时16分,已成功开启气闸舱出舱舱门。目前,航天员陈冬已出舱,蔡旭哲即将出舱,航天员刘洋在核心舱内配合支持。
舱外活动期间,两名出舱航天员将先后配合完成舱间连接装置安装、问天实验舱全景相机抬升等作业。此次是我国航天员在空间站进行的第七次出舱活动,预计历时6.5个小时。
神舟十四号航天员的第三次出舱活动,是中国空间站组装形成“T”字基本构型后的首次出舱活动。跟此前的出舱活动相比,这一次舱外活动对航天员的操作复杂度以及精细度提出了更高的要求。
这次出舱活动主要安排有舱间连接装置的安装、舱外全景摄像机的抬升以及舱外工具的调整,并且需要在小机械臂上再安装一个助力把手。
中国航天员科研训练中心航天员选拔训练室主任 王焰磊:首次使用两个机械臂,大臂小臂形成组合臂的状态下支持出舱活动任务。大家可以想象一下,单臂的长度已经很长了,两个臂组合以后长度更长,它的柔性、刚性等和单臂状态有一些区别的。在这种情况下载人去支持完成出舱任务,也是我们首次做的一个验证。
空间站组装形成“T”字基本构型后,航天员出舱活动中在舱壁上的爬行距离对比以往将会更长,因此机械臂支持转移的范围将需要更大。
中国航天员科研训练中心航天员选拔训练室主任 王焰磊:T字构型下,气闸舱是在问天舱的末端,相当于是在T字构型的一个末端。那么机械臂带人到各个作业点的话,它的路径转移会比以前更长,所以机械臂的运动时间也会更长,这是主要特点。
这次出舱活动中,航天员需要在三个舱段之间建立硬质连接,保障后续航天员在舱外各个作业点之间爬行都有相应的路径。
中国航天员科研训练中心航天员选拔训练室主任 王焰磊:在两个舱间连接装置作业点,本身设计了机械臂上航天员的不同的作业位置的,它的复杂度以及操作精细度更高。举个例子,舱间连接装置的其中一个固定点就有三重锁,每一重锁航天员都要锁定到位,而且它有相互关联关系,这就要航天员的操作精细度更高一些,而且要保证连接装置两端连接紧固,保证以后航天员在舱外自主转移过程中路径是一个可靠的路径。
-

天天时讯:前10月河南省商品房销售额同比下降17.6%
头条 22-11-17
-

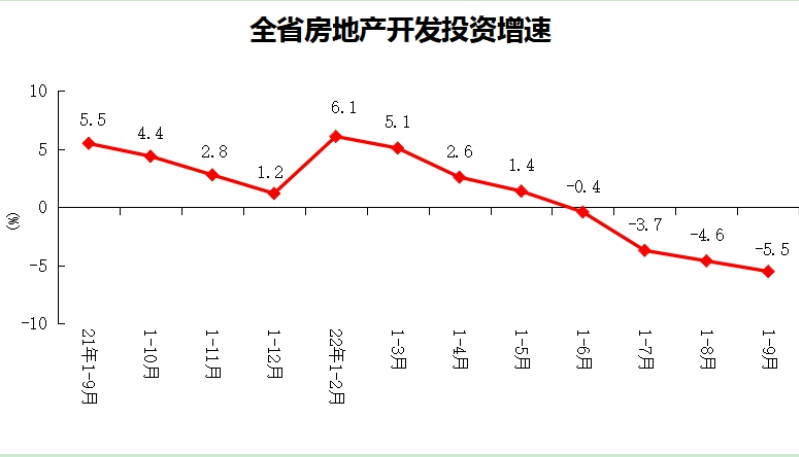
全球新资讯:刚刚!10月份河南省经济运行情况公布
头条 22-11-17
-

即时焦点:前10月河南省固定资产投资同比增长9.3%
头条 22-11-17
-

快播:10月份,河南省规模以上工业增加值同比增长7.1%
头条 22-11-17
-

10月份河南社会消费品零售总额下降3.2%
头条 22-11-17
-

当前聚焦:焦作市通告:18日8时起,社会面无疫情传播地区有序开放各类场所
头条 22-11-17
-

快看:飞龙股份:成为北汽越野车的水阀总成供应商
头条 22-11-17
-

当前快看:“买房可免费乘坐地铁十年”,南宁轨道地产出卖房新招
头条 22-11-17
-

刘彦平受贿2.34亿元,一审开庭
头条 22-11-17
-

河南水投资本联手中信银行,首笔线上银企直连融资业务落地
头条 22-11-17
-

利率2.17%!中原高速完成发行5亿元超短融
头条 22-11-17
-

焦点快看:新华三持续深耕河南,助力打造数字经济强省
头条 22-11-17
-

全国首个!开封市污泥和餐厨废弃物综合利用项目已投入运行
头条 22-11-17
-

每日热闻!过紧日子!生鲜电商“双雄”开启减亏之旅
头条 22-11-17
-

环球热点评!太龙药业:产品双黄连口服液被列入北京、河南等多省市新冠肺炎诊疗方案
头条 22-11-17
-

世界热消息:见证历史!超1200亿巨资出手
头条 22-11-17
-

总投资4.54亿元!黄河大道西延工程项目力争年底前建成通车
头条 22-11-17
-

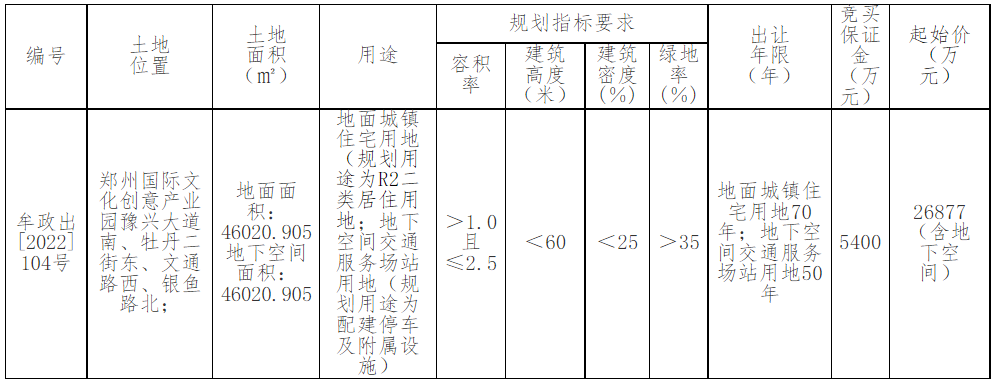
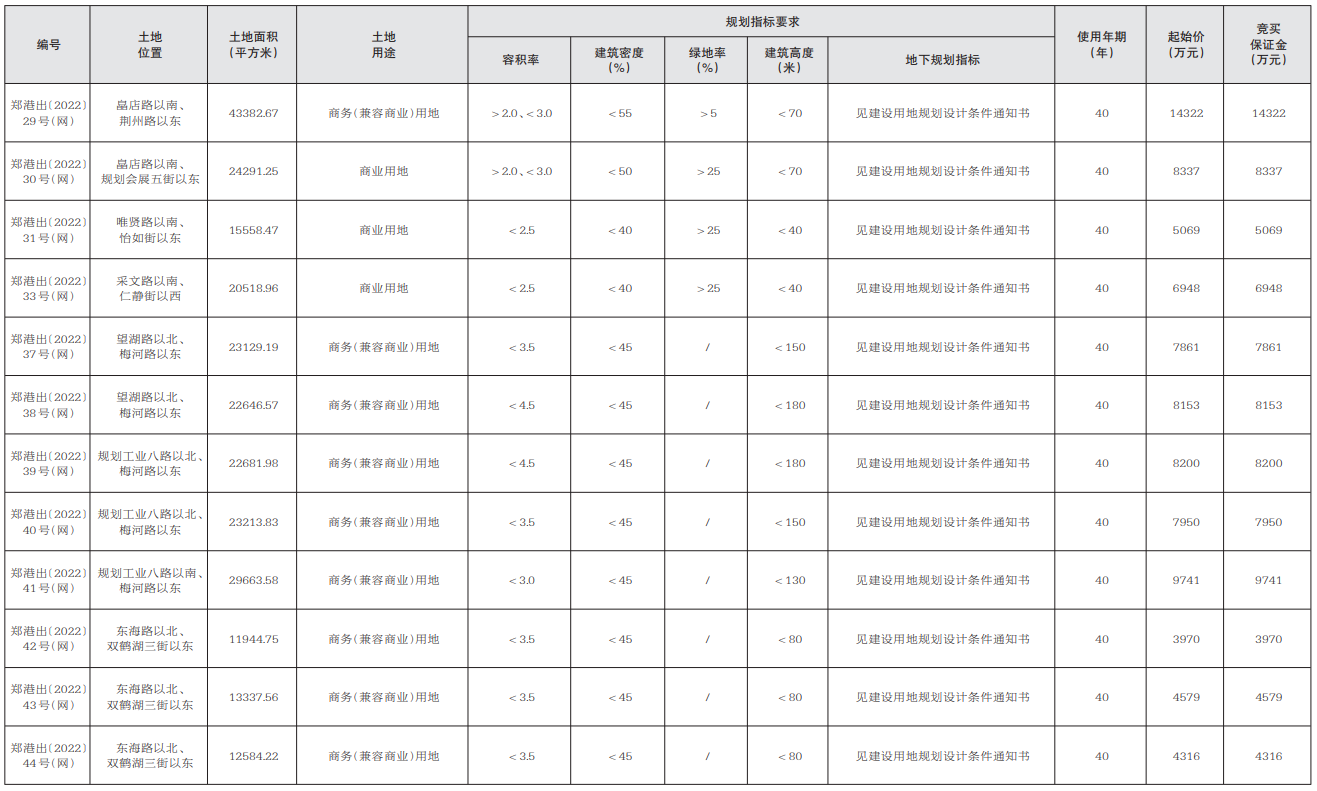
成交价8325万元!郑州2宗地块完成出让
头条 22-11-17
-

天天报道:河南昨日新增本土确诊病例137例 本土无症状感染者1521例
头条 22-11-17
-

快资讯:隔夜欧美·11月17日
头条 22-11-17
-

【天天新视野】安伟:搭建普惠金融平台 创新金融服务模式为中小微企业复产纾困提供强劲动力
头条 22-11-17
-

天天最资讯丨郑州市金水区:调整部分区域风险等级
头条 22-11-17
-

简讯:郑州市上街区119家“白名单” 企业全部正常生产运行
头条 22-11-17
-

焦点速递!立方风控鸟·早报(11月17日)
头条 22-11-17
-

热点在线丨环球时报:帮富士康招工,也是在稳定供应链
头条 22-11-17
-
当前短讯!郑州市二七区新增45个高风险区
头条 22-11-17
-

全球新消息丨郑州市荥阳市新增8个高风险区
头条 22-11-16
-

世界动态:河南省前三季度社会物流总额近14万亿,新增42家A级物流企业
头条 22-11-16
-

2022年国家工业旅游示范基地名单公布,河南2个园区上榜
头条 22-11-16
-

力争2025年GDP突破3000亿,郑州航空港区如何建设世界级物流枢纽?
头条 22-11-16
-

快报:立方风控鸟·晚报(11月16日)
头条 22-11-16
-

腾讯发布三季报:微信月活13.09亿 数实收入再超游戏
头条 22-11-16
-

【全球速看料】郑州高新区新增8个高风险区
头条 22-11-16
-

世界关注:财政部提前下达河南省专项资金3.46亿元 支持普惠金融发展
头条 22-11-16
-

世界观察:最高支持1000万元!河南启动省产业研发联合基金重大项目申报
头条 22-11-16
-

全球头条:河南311个专项债项目拟通过评审,债券规模510亿元
头条 22-11-16
-

南宁轨道地产集团:购房可10年免费坐地铁
头条 22-11-16
-

郑州市中医院预防治疗新冠制剂获河南省药品监督管理局审批
头条 22-11-16
-

快看:河南航投集团刘建葆:抢抓空中丝路与RCEP协定新机遇,拓深织密航线网络
头条 22-11-16
-

全球观天下!中原高速调整5亿元超短融申购区间上限为2.17%
头条 22-11-16
-

【天天时快讯】总投资59.1亿元!南阳电厂二期工程开工
头条 22-11-16
-

【世界快播报】许昌市财政局:拟将许昌建投100%股权划转至市城投发展集团
头条 22-11-16
-

热点评!信阳市启动重污染天气预警响应 为期4天
头条 22-11-16
-

今日热闻!国家发展改革委负责同志会见美中贸易全国委员会会长艾伦及美企业代表团
头条 22-11-16
-

全球快资讯:守住“三农”基本盘,漯河辖内农发行累投贷款26.1亿元
头条 22-11-16
-

腾讯控股三季报出炉!第三季度净利润399亿元,同比基本持平
头条 22-11-16
-

【天天热闻】腾讯拟将9.58亿股美团股份作为特别股息派发 总市值约1594亿港元
头条 22-11-16
-

【全球播资讯】重庆钢铁:董事长、总裁、高级副总裁辞职
头条 22-11-16
-

今年火锅季七成用户线上点单,糟粕醋火锅成郑州人最爱之一
头条 22-11-16
-
当前焦点!京津冀交通网“缝补织密”再提速!北京4条高速同步在建
头条 22-11-16
-
84家单位申请河南省创新创业孵化载体,名单公示
头条 22-11-16
-

全球热议:43家,2022年江苏省信用管理示范企业名单公布
头条 22-11-16
-

报道:文旅部优化跨省旅游政策:跨省游产品连夜上架 搜索量达国庆以来峰值
头条 22-11-16
-

每日速递:四川省投资集团董事长刘体斌被立案调查
头条 22-11-16
-
【环球快播报】冲击“美容院第一股” 美丽田园递表港交所
头条 22-11-16
































































































































- 前沿资讯!第三次出舱,神舟十四号乘组面临2022-11-17
- 天天时讯:前10月河南省商品房销售额同比下2022-11-17
- 全球新资讯:刚刚!10月份河南省经济运行情2022-11-17
- 即时焦点:前10月河南省固定资产投资同比增2022-11-17
- 【环球快播报】世界杯开幕在即,香港海关查2022-11-17
- 快播:10月份,河南省规模以上工业增加值同2022-11-17
- 焦点快播:兵乓球亚洲杯:王楚钦4-1格拉斯2022-11-17
- 10月份河南社会消费品零售总额下降3.2%2022-11-17
- 李伟主持召开工业强县指挥部周例会2022-11-17
- 世界微资讯!医疗保障局开展落实集中带量采2022-11-17
- 全球快看点丨兰考县“三个优化” 服务专技2022-11-17
- 全球滚动:卢军任湖北交投集团党委书记、董2022-11-17
- 环球最新:顺河回族区颁发首张“个体户直接2022-11-17
- 【世界聚看点】足协杯:三镇轮换大胜携手泰2022-11-17
- 信息:湖南一女子带着2岁孩子跳河轻生,救2022-11-17
- 世界快资讯:鹤山市局开展行政执法专项检查2022-11-17
- 少跑腿 快速办 郑州居民就医可线上预约、2022-11-17
- 1500公里串联28家景区!洛阳建设“中国伏牛2022-11-17
- 每日热门:明晚《闪耀吧!殷墟》带你一起探2022-11-17
- 微动态丨提醒:郑州地铁6号线一期工程货站2022-11-17
- 世界滚动:世界杯前瞻·G组丨“桑巴军团”冲2022-11-17
- 环球讯息:河南考区2022年全国导游资格考试2022-11-17
- 天天速讯:服务升级!郑州居民就医可线上预2022-11-17
- 探索“花样”模式,打造“美丽”经济——昆2022-11-17
- 焦点速看:海贼王剧场版走红,日本动画北美2022-11-17
- 焦点播报:最高法典型案例:微信抽奖后中奖2022-11-17
- 【全球独家】接手暴雪游戏代理?腾讯、米哈2022-11-17
- 焦点速递!多地出现排长队做核酸情况,如何2022-11-17
- 因地制宜发展种植药菊 为乡村发展提质增效2022-11-17
- 每日消息!今日0时至15时北京新增本土218例2022-11-17
精彩推荐

阅读排行
- 少跑腿 快速办 郑州居民就医可线上预约、医保线上支付
- 1500公里串联28家景区!洛阳建设“中国伏牛1号生态旅游公路”
- 每日热门:明晚《闪耀吧!殷墟》带你一起探源中华文明,揭开殷墟的神秘面纱
- 微动态丨提醒:郑州地铁6号线一期工程货站街站施工 交通有变!
- 世界滚动:世界杯前瞻·G组丨“桑巴军团”冲击六星荣耀,建业旧将巴索戈登场世界杯
- 速递!“卡”车来了 | 出征!大象新闻特约记者抵达多哈,全景探访卡塔尔世界杯新闻中心
- “卡”车来了 | 2022年卡塔尔世界杯冠军奖杯现身哈里发公园球迷广场
- 大象帮丨同种药品不同药店不同价 监管部门:经营者自主定价
- 暖新闻|男童扎伤眼角膜 这一连串奔跑、护送 没有一个动作是多余的
- 我的奋斗丨疫情下的郑州出租车司机:结束住在车里的日子,家里的饺子真香!











